Collaborative Robot Overview
A collaborative robot, or cobot, is a type of robot intended to physically interact with humans in a shared workspace.
Collaborative robots are experiencing rapid market growth in this sector of the robotics industry, with the primary driving force behind this growth being consistently decreasing prices. Many collaborative robots are available for under $45K, making them a viable solution in a wide range of applications, inside and outside of the factory setting, for companies big and small.
With the popularity of collaborative robots booming in recent years, we receive a lot of questions about which applications are best for them. While there are many applications that are ideal for collaborative robots, we'll go over the top four and give some examples of each.
This application involves a collaborative robot loading and unloading parts into CNC machines such as mills and lathes. Typically, this is a good choice for machine centers where a decent quantity of parts will be run before changing over to the next part. This allows skilled machinists time to program machines or modify programs, while the collaborative robot does the simple loading and unloading of raw material to be machined. In the video below you can see an example of this where a collaborative robot from Kassow Robots is used.
2) Assembly
Light assembly jobs are perfect fits for collaborative robots. They can press parts together, put parts in place for other joining processes, and a variety of other repetitive tasks in assembly. With difficulties finding and keeping good labor for the repetitive tasks in high volume assembly, a collaborative robot can work alongside assemblers in completing tasks that most humans do not want to do day in and day out. Below, you can see another example from Kassow Robots where the cobot and worker share the same space to accomplish the assembly.
There are many manufacturing processes that require parts to be picked from one location and placed in another. Collaborative robots with integrated vision can inspect the part location and orientation in order to properly pick the part. Once the part is picked, it can be placed in the proper location, whether that is on a conveyor, package, or into a manufacturing jig for other processes to begin.
In this example we can see Precise Automation's collaborative robot working alongside an Asyril feeder to pick a small plastic part (tablet). Tablets in the correct orientation are picked then dipped in a liquid before being inserted into a larger plastic housing. A second gripper is used to pick up the plastic housing and place it into a small press. A third gripper clears the press and the cobot then sorts good parts versus rejects.
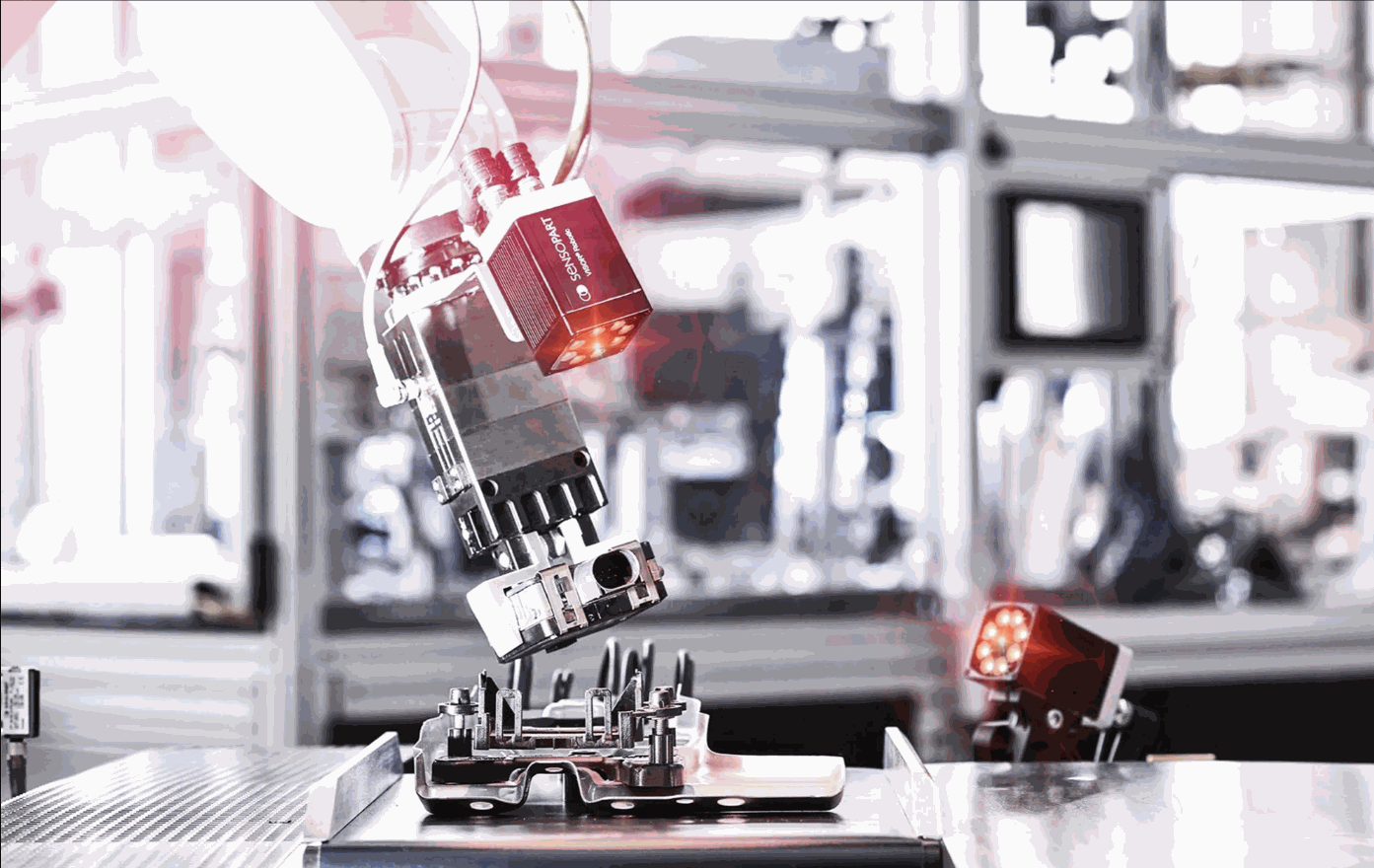
4) Vision Inspection
One of the most tedious, boring and difficult tasks for humans to do all day, over and over, is inspecting for quality. Whether it is for finding defects or simply inspecting if all parts are present, a collaborative robot with integrated vision can quickly, accurately and repeatably inspect a variety of factors to help improve quality. Furthermore, this frees up skilled labor for higher value tasks. Automating vision inspections can be tricky, which is why at BlueBay we offer proof-of-concept services to minimize the risk on the customer's end.